
Servomotor ist ein wichtiger Teil von Laserschneidausrüstung. Es kann eine stabile Stromversorgung bereitstellen, um einen stabilen Betrieb zu gewährleisten. Viele Menschen wissen nicht viel über Servomotoren. Dieser Artikel hilft Ihnen, den Unterschied zwischen Schrittmotor und Servomotor zu verstehen.

Unterschied zwischen Servomotoren und Schrittmotoren
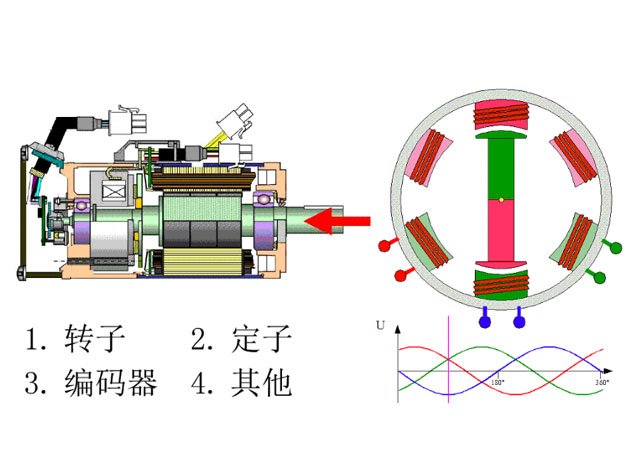
Was ist ein Servomotor?
Die Funktion des Servomotors besteht darin, die Geschwindigkeit bei Spannungsänderungen gleichmäßig und stabil zu steuern und per Impuls zu orten. Wenn ein Impulsstrom empfangen wird, dreht er sich um den entsprechenden Winkel eines Impulses, um eine Eindeutigkeit zu erreichen.
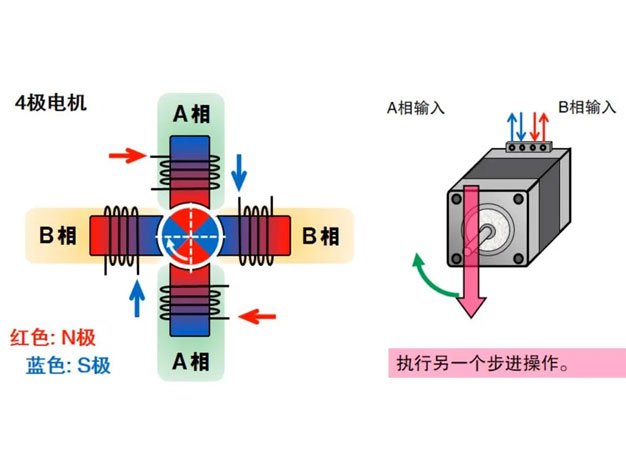
Was ist ein Schrittmotor?
Ein Schrittmotor ist ein Motor, der elektrische Impulssignale in entsprechende Winkelverschiebungen oder lineare Verschiebungen umwandelt.
Wie funktionieren Servomotoren/Schrittmotoren?
Der Servomotor selbst hat die Funktion, Impulsstrom auszusenden. Durch Drehen eines Winkels wird eine entsprechende Anzahl von Impulsen erzeugt, und der Servomotor empfängt den Impuls, um eine Antwort zu bilden, sodass das System weiß, wie viele Impulse an den Servomotor gesendet und wie viele Impulse wiederhergestellt werden, wodurch die Drehung des Motors genau gesteuert werden kann.
Jedes Mal, wenn ein Impulssignal in den Schrittmotor eingegeben wird, dreht sich der Rotor um einen festgelegten Winkel oder bewegt sich eine bestimmte Strecke vorwärts. Daher ist die Ausgangswinkelverschiebung oder lineare Verschiebung des Schrittmotors proportional zur Anzahl der Eingangsimpulse, während die Drehgeschwindigkeit proportional zur Impulsfrequenz ist. Dies bedeutet, dass die Winkelverschiebung durch Steuern der Impulsanzahl gesteuert werden kann, um eine genaue Positionierung zu erreichen; durch Steuern der Impulsfrequenz können die Drehgeschwindigkeit und die Beschleunigung des Motors gesteuert werden, um eine Geschwindigkeitsregulierung zu erreichen.
Unterschied zwischen Servomotor und Schrittmotor
Funktionsprinzip
Ein Schrittmotor ist ein Schrittmotorgerät mit offenem Regelkreis, das elektrische Impulssignale in Winkelverschiebung oder lineare Verschiebung umwandelt. Sehen Sie sich das Funktionsprinzip eines Schrittmotors an.
Der Servomotor ist auf Impulse angewiesen, um zu positionieren, und hat die Funktion, Impulse zu senden.
Kosten
Schrittmotoren haben Vorteile in Bezug auf das Preis-Leistungs-Verhältnis. Um die gleiche Funktion zu erreichen, ist der Preis eines Servomotors höher als der eines Schrittmotors mit der gleichen Leistung.
Die Vorteile der hohen Reaktion, der hohen Geschwindigkeit und der hohen Präzision von Servomotoren bestimmen den hohen Preis des Produkts, was unvermeidlich ist.
Antiresonanz
Das Schrittmotorsystem hat einen inhärenten Resonanzpunkt. Der Schrittmotortreiber der SR-Serie berechnet den Resonanzpunkt automatisch und verwendet ihn, um den Steueralgorithmus anzupassen, um das Ziel der Unterdrückung der Resonanz zu erreichen. Es verbessert die Stabilität der Zwischenfrequenz erheblich und ermöglicht eine größere Stabilität bei hohen Geschwindigkeiten. Drehmomentabgabe, bessere Hochgeschwindigkeitsleistung.
Der Servomotor läuft reibungslos und vibriert bei niedrigen Geschwindigkeiten nicht. Das AC-Servosystem verfügt über eine Resonanzunterdrückungsfunktion, die den Mangel an mechanischer Steifigkeit ausgleichen kann. Das System verfügt außerdem über eine systeminterne Frequenzanalysefunktion (FFT), die den Resonanzpunkt der Maschine erkennen kann, um die Systemanpassung zu erleichtern.
Laufleistung
Schrittmotoren werden im Allgemeinen mit offenem Regelkreis gesteuert. Motor;
Der Servomotor verwendet einen geschlossenen Regelkreis, der einfacher zu steuern ist und kein Außer-Schritt-Phänomen verursacht.
Geschwindigkeit und Überlastfähigkeit
Schrittmotoren neigen zu niederfrequenten Vibrationen
Dieses Phänomen tritt bei Servomotoren nicht auf. Ihre geschlossenen Regelkreiseigenschaften sorgen für ihre hervorragende Leistung bei Hochgeschwindigkeitsbetrieb.

Technischer Unterschied Schrittmotor vs Servomotor
- Steuerungsmethode
Schrittmotoren verwenden eine offene Regelschleife, die sich auf Impulssignale zur Steuerung des Motordrehwinkels stützt und keine Positionsrückmeldung hat.
Servomotoren verwenden eine geschlossene Regelschleife, die sich auf Encoder zur Erkennung des Motordrehwinkels und zum Vergleich mit der Zielposition stützt, um Fehler zu korrigieren und die Steuerungsgenauigkeit sicherzustellen.
- Genauigkeit
Aufgrund der offenen Regelschleife weisen Schrittmotoren Schrittfehler und kumulative Fehler auf und die Genauigkeit ist geringer.
Aufgrund der geschlossenen Regelschleife können Servomotoren die Fehler von Schrittmotoren überwinden und die Genauigkeit ist höher.
- Geschwindigkeit
Schrittmotoren neigen bei niedrigen Geschwindigkeiten zur Resonanz und ihre Leistung bei hohen Geschwindigkeiten ist schlecht.
Servomotoren können das Resonanzproblem überwinden und die Leistung bei hohen Geschwindigkeiten ist besser.
- Drehmoment
Das Ausgangsdrehmoment eines Schrittmotors nimmt mit zunehmender Geschwindigkeit ab. Das Drehmoment bei niedrigen Geschwindigkeiten ist größer und das Drehmoment bei hohen Geschwindigkeiten kleiner.
Das Ausgangsdrehmoment eines Servomotors ist innerhalb des Nenndrehzahlbereichs grundsätzlich konstant und er kann ein größeres Drehmoment bereitstellen.
- Reaktionsgeschwindigkeit
Die Reaktionsgeschwindigkeit eines Schrittmotors ist langsamer und die Beschleunigung ist begrenzt.
Die Reaktionsgeschwindigkeit eines Servomotors ist schneller und die Beschleunigung ist größer.
- Belastbarkeit
Schrittmotoren haben keine Überlastbarkeit und neigen dazu, bei Überlastung Schritte zu verlieren oder abzuwürgen.
Servomotoren haben eine Überlastbarkeit und können einer gewissen Überlastung standhalten.
- Lärm und Vibration
Schrittmotoren neigen bei niedriger Drehzahl zu Lärm und Vibration.
Servomotoren können Lärm und Vibration effektiv unterdrücken.
- Kosten
Schrittmotoren haben eine einfache Struktur und sind relativ günstig.
Servomotoren haben eine komplexe Struktur und sind relativ teuer.
- Anwendungsszenarien
Schrittmotoren eignen sich für Anwendungen mit geringen Anforderungen an Genauigkeit und Geschwindigkeit, wie z. B. Positions- und Geschwindigkeitsregelung.
Servomotoren eignen sich für Anwendungen mit hohen Anforderungen an Genauigkeit, Geschwindigkeit und Belastung, wie z. B. CNC-Werkzeugmaschinen, Roboter und Fahrzeuge mit alternativer Antriebstechnik.
Unterschied Servo-Schrittmotor
Servomotor oder Schrittmotor sind zwei häufig verwendete Motortypen. Sie haben unterschiedliche Funktionsprinzipien und Leistungsmerkmale. Die Auswahl des richtigen Motors erfordert umfassende Überlegungen basierend auf den Anwendungsanforderungen.

Anwendungen von Schrittmotoren und Servomotoren
Schrittmotoren und Servomotoren sind zwei häufig verwendete Motortypen. Sie haben unterschiedliche Funktionsprinzipien und Leistungsmerkmale, daher gibt es auch Unterschiede in ihren Anwendungsbereichen.
Anwendung für Schrittmotoren:
- CNC-Werkzeugmaschinen: Wird verwendet, um die Vorschubbewegung von Werkzeugmaschinen zu steuern, um eine präzise Positionierung zu erreichen.
- Automatisierungsgeräte: Wird verwendet, um die Zufuhr, Sortierung, das Schneiden und andere Aktionen der automatisierten Produktionslinie zu steuern.
- 3D-Drucker: Wird verwendet, um die XYZ-Achsenbewegung des Druckers zu steuern, um einen präzisen Druck zu erreichen.
- Roboter: Wird verwendet, um die Gelenkbewegung des Roboters zu steuern, um flexible Bewegungen zu erreichen.
- Instrumentierung: Wird verwendet, um die Drehung des Instrumentenzeigers zu steuern, um eine Anzeige und Messung zu erreichen.
- Haushaltsgeräte: Wird verwendet, um bestimmte Funktionen von Haushaltsgeräten wie Waschmaschinen, Klimaanlagen und Reiskochern zu steuern.
Servomotoranwendungen
- Industrielle Steuerung: Wird zur Steuerung von Industrieanlagen wie mechanischen Armen, Robotern und automatisierten Produktionslinien verwendet.
- CNC-Werkzeugmaschinen: Wird zur Steuerung der Drehzahl und des Drehmoments der Werkzeugmaschinenspindel verwendet, um eine hochpräzise Bearbeitung zu erreichen.
- Fahrzeuge mit alternativer Antriebstechnik: Wird zur Steuerung der Motordrehzahl und des Drehmoments von Elektrofahrzeugen verwendet, um ein effizientes Fahren zu erreichen.
- Luft- und Raumfahrt: Wird zur Steuerung von Ruderflächen, Klappen und anderen Komponenten von Flugzeugen, Raketen und anderen Fluggeräten verwendet.
- Medizinische Geräte steuern Präzisionsinstrumente wie Operationsroboter und medizinische Bildgebungsgeräte.
- Roboter: Wird zur Steuerung der Gelenkbewegung des Roboters verwendet, um hochpräzise Bewegungen zu erreichen.
Vergleich der Anwendungen zwischen Schrittmotor oder Servo
- Schrittmotoren haben die Vorteile einer einfachen Struktur, niedriger Kosten und bequemer Steuerung, aber ihre Genauigkeit und Geschwindigkeit sind relativ gering.
- Servomotoren haben die Vorteile einer hohen Präzision, hohen Geschwindigkeit und sensiblen Reaktion, aber ihre Strukturen sind komplex und ihre Kosten hoch.
- Daher müssen bei der Auswahl eines Motortyps Faktoren wie Anwendungsbedarf, Kosten und technische Anforderungen berücksichtigt werden.

So wählen Sie Servomotor oder Schrittmotor aus
- Wenn die Anwendung keine hohen Anforderungen an Genauigkeit, Geschwindigkeit und Drehmoment stellt und das Kostenbudget begrenzt ist, können Sie einen Schrittmotor wählen.
- Wenn die Anwendung hohe Genauigkeit, Geschwindigkeit und Drehmoment erfordert, können Sie einen Servomotor wählen.
- Wenn die Anwendung eine komplexe Bewegungssteuerung erfordert, können Servomotoren gewählt werden.
- Wenn die Anwendung den Einsatz in rauen Umgebungen erfordert, müssen Sie einen Motor mit Schutzklasse wählen.
So wählen Sie einen Schrittmotor aus
- Motorgröße bestimmen
Berücksichtigen Sie den Einbauraum und die Anforderungen an die Motorleistung.
Die Motorgröße wird normalerweise durch den Außendurchmesser und die Länge des Motors bestimmt.
Gängige Schrittmotorgrößen: NEMA17, NEMA23, NEMA34, NEMA42 usw.
- Motordrehmoment bestimmen
Berücksichtigen Sie das Lastdrehmoment, die Beschleunigungsanforderungen und die Arbeitsumgebung.
Das Motordrehmoment wird normalerweise in Nm oder lb-in angegeben.
Das Drehmoment des Schrittmotors kann durch Auswahl eines anderen Motormodells oder Hinzufügen eines Untersetzungsgetriebes erhöht werden.
- Motordrehzahl bestimmen
Berücksichtigen Sie die Anwendungsanforderungen und die Nenndrehzahl des Motors.
Die Motordrehzahl wird normalerweise in U/min angegeben.
Die Drehzahl eines Schrittmotors kann durch Ändern der Impulsfrequenz des Treibers angepasst werden.
- Motorgenauigkeit bestimmen
Berücksichtigen Sie die Anwendungsanforderungen und den Schrittwinkel des Motors.
Die Motorgenauigkeit wird normalerweise in Schrittwinkel oder Anzahl der Impulse pro Umdrehung angegeben.
Die Genauigkeit eines Schrittmotors kann durch den Einsatz von Mikroschritttechnologie verbessert werden.
- Wählen Sie einen Motortreiber
Wählen Sie einen Treiber, der zum Motor passt.
Der Treiber wird hauptsächlich zur Steuerung der Motorbewegung verwendet.
Gängige Treibertypen: Impuls-/Richtungstreiber, Servotreiber usw.
- Andere Faktoren
Berücksichtigen Sie Motorpreis, Geräuschentwicklung, Vibration usw.
Wählen Sie einen Motor, der den Anwendungsanforderungen und dem Budget entspricht.
So wählen Sie einen Servomotor aus
- Motorgröße bestimmen
Berücksichtigen Sie den Einbauraum und die Anforderungen an die Motorleistung.
Die Motorgröße wird normalerweise durch den Außendurchmesser und die Länge des Motors bestimmt.
Gängige Servomotorgrößen: 40 mm, 60 mm, 80 mm, 110 mm usw.
- Motordrehmoment bestimmen
Berücksichtigen Sie das Lastdrehmoment, die Beschleunigungsanforderungen und die Arbeitsumgebung.
Das Motordrehmoment wird normalerweise in Nm oder lb-in angegeben.
Das Servomotordrehmoment kann durch Auswahl eines anderen Motormodells oder Hinzufügen eines Untersetzungsgetriebes erhöht werden.
- Motordrehzahl bestimmen
Berücksichtigen Sie die Anwendungsanforderungen und die Nenndrehzahl des Motors.
Die Motordrehzahl wird normalerweise in U/min angegeben.
Die Drehzahl eines Servomotors kann durch Ändern der Befehlsfrequenz des Treibers angepasst werden.
- Motorgenauigkeit bestimmen
Berücksichtigen Sie die Anwendungsanforderungen und die Auflösung des Motorencoders.
Die Motorgenauigkeit wird normalerweise in Impulsen pro Umdrehung (PPR) angegeben.
Die Genauigkeit eines Servomotors kann durch Auswahl eines Encoders mit höherer Auflösung verbessert werden.
- Wählen Sie einen Motortreiber
Wählen Sie einen Treiber, der zum Motor passt.
Der Treiber wird hauptsächlich zur Steuerung der Motorbewegung verwendet.
Gängige Treibertypen: AC-Servotreiber, DC-Servotreiber usw.
- Wählen Sie einen Motorcontroller
Wählen Sie einen Controller, der zum Treiber passt.
Der Controller wird hauptsächlich zum Senden von Steuerbefehlen an den Treiber verwendet.
Gängige Controllertypen: SPS, Bewegungssteuerungskarte, PC usw.
- Andere Faktoren
Berücksichtigen Sie Motorpreis, Geräusch, Vibration, Schutzniveau usw.
Wählen Sie einen Motor, der die Anwendungsanforderungen und das Budget erfüllt.
Unterschied zwischen Servo- und Stepper-Faktor
| Factor | Stepper Motor | Servo Motor |
|---|---|---|
| Price | Lower | Higher |
| Accuracy | Lower | Higher |
| Speed | Lower | Higher |
| Torque | Lower | Higher |
Servomotorfunktion der Faserlaserschneidmaschine
Mechanische Faktoren
Hauptsächlich in Design, Übertragungsmethode, Installation, Material, mechanischem Verschleiß und anderen Aspekten reflektiert.
Mechanische Eigenspannung, äußere Kraft und andere Faktoren
Aufgrund von Unterschieden in mechanischen Materialien und Installation sind die mechanische Eigenspannung und die Haftreibung jeder Übertragungswelle am Gerät inkonsistent. Wenn eine der beiden an der Bahninterpolationssteuerung beteiligten Achsen eine größere Eigenspannung oder Haftreibung aufweist, verbraucht sie das Servodrehmoment bis zu einem gewissen Grad, wodurch die Beschleunigung dieser Achse verlangsamt wird, was zu einer Verformung der Bearbeitungskontur führt. Das Eigenspannungsproblem der Antriebswelle kann durch die Wellenformkurve beobachtet werden, die durch die Rückmeldung des Servoantriebs erzeugt wird.
Auf die Welle wirkende äußere Kraft. Bei normalen Plattenschneidemaschinen besteht kein Kontakt zwischen jeder Achse und dem Werkstück, und die möglicherweise aufgenommene äußere Kraft ist begrenzt. Bei Rohrschneidemaschinen nimmt die Rohrvorschubachse während des Schneidens an der Interpolation teil, während die andere Achse im Allgemeinen berührungslos ist. Aufgrund des Einflusses der Klemme erzeugt das Rohr eine Gegenkraft auf die Rohrvorschubachse. Die Kraftverhältnisse der beiden an der Interpolationssteuerung beteiligten Achsen sind inkonsistent, was den Schneideffekt definitiv beeinträchtigt.
Mechanische Resonanz
Die größere Auswirkung mechanischer Resonanzprobleme auf das Servo besteht darin, dass die Reaktionsfähigkeit des Servomotors nicht weiter verbessert werden kann, was dazu führt, dass die gesamte Ausrüstung in einem Zustand relativ geringer Reaktion läuft.
CNC-Systemfaktoren
Die Debugging-Wirkung des Servos ist nicht offensichtlich und das Steuerungssystem muss angepasst werden. Bei der Verarbeitung von Faserlaserschneidmaschinen ist die lineare Geschwindigkeit normalerweise relativ konstant und die Geschwindigkeit ist sowohl auf geraden Linien als auch auf Kurven gleich.
Mechanisches Zittern
Mechanisches Zittern ist im Wesentlichen ein Problem der Eigenfrequenz der Maschine. Es tritt normalerweise bei einseitigen festen Auslegerstrukturen auf, insbesondere während der Beschleunigungs- und Verzögerungsphasen. Niederfrequentes Zittern hat im Werkstück eine große wellenartige Form und höherfrequentes Zittern hat eine gezackte Form.
Die Rolle des Servomotors ist nach wie vor sehr wichtig und wir dürfen sie nicht ignorieren. Daher wird weiterhin empfohlen, dass jeder beim Kauf von Faserlaserschneidmaschinen einen garantierten Händler wählt!
Es gibt große Unterschiede zwischen einem Schrittmotor und einem Servomotor in Bezug auf Funktionsprinzip, Überlastkapazität, Betriebsleistung und Kosten. Beide haben jedoch ihre eigenen Vorteile. Wenn Benutzer zwischen ihnen wählen möchten, müssen sie ihre tatsächlichen Anforderungen und Anwendungsszenarien kombinieren.


